引言
对预测性维护相关资料进行整理,便于查阅。
预测性维护工作流
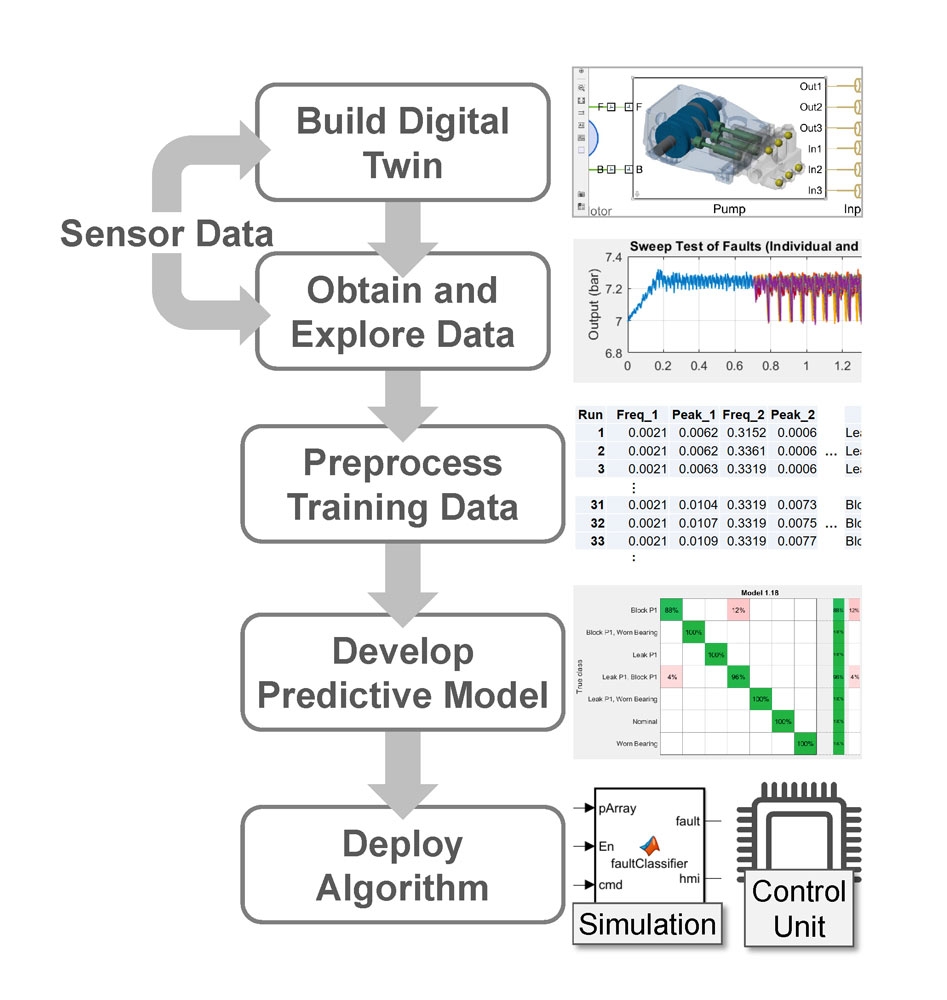
结合Simulink仿真和预测性维护工具箱(Predictive Maintenance Toobbox)
- 构建数字孪生体
- 获取数据
- 数据预处理
- 创建预测模型
- 部署算法
预测性维护主要包括两个方向:故障诊断和剩余寿命(RUL)预测。
Data Ensembles for Condition Monitoring and Predictive Maintenance
所需数据主要包括三类:
- 系统正常运行
- 系统在故障状态下运行
- 系统运行的寿命记录(从正常到故障的数据)
小迈步之人工智能(二):大数据跌进人工智能的坑,预测性维护如何实现和落地
主要内容包括:
- 利用数字孪生仿真目标对象,并产生仿真数据
- 利用数据进行预处理和特征提取
- 利用机器学习技术构建设备的故障诊断和剩余寿命预测模型
- 利用 App Designer 生成用户界面
故障诊断工作流相关
Predictive Maintenance in Hydraulic Pump
Multi-Class Fault Detection Using Simulated Data
Analyze and Select Features for Pump Diagnostics
- 导入带标签的数据
- 对数据进行预处理
- 对数据进行探索和特征提取
- 选择合适的机器学习分类模型
- 决策树
- SVM
- 朴素贝叶斯分类器
- 最近邻分类器
- 集成分类器
- 提升树
- 装袋树
- …
- …
寿命预测工作流相关
Wind Turbine High-Speed Bearing Prognosis
Data Import
数据导入主要通过 fileEnsembleDatastore 函数来完成。
Data Exploration
对初始数据进行初步的探索,包括一些基础特征的变化等等。主要通过各类统计图的观察来初步分析。
Feature Extraction
基于前一步数据探索后的结果对需要、有价值的特征进行提取,主要包括以下特征:
- 时域(time-domain)
MeanStdSkewnessKurtosisPeak2PeakRMSCrestFactorShapeFactorImpulseFactorMarginFactorEnergy- …
- 频域
- 谱峰(spectral kurtosis)
SKMeanSKStdSKSkewnessSKKurtosis- …
- 谱峰(spectral kurtosis)
关于信号频域分析方法的理解,参见:信号频域分析方法的理解(频谱、能量谱、功率谱、倒频谱、小波分析) - Mr.括号的文章 - 知乎
Feature Postprocessing
提取出的特征通常包含噪声,因此需要进行平滑处理。
这里采用的是移动均值平滑(moving mean smothing),对应的 matlab 函数为 movmean 。该方法会引入信号的时间延迟,可以通过在 RUL 预测中选择适当的阈值来减轻延迟影响。
对于时间序列的平滑处理主要包括两种方法:移动平均法(Moving average, MA)和指数平滑法(Exponential Smoothing, ES),具体可参考:
- Moving average and exponential smoothing models
- 移动平均法(Moving average,MA)指数平滑法(Exponential Smoothing,ES)
- Introduction to Time Series Analysis
Training Data
创建训练集。通常利用现有数据的部分数据作为训练集。
Feature Importance Ranking
对数据特征的重要性进行排序。这里选择的是单调性(monotonicity)来度量这些特征的重要性。对应的 matlab 函数为 monotonicity。
Dimension Reduction and Feature Fusion
利用主成分分析(PCA)对特征进行降维,在进行 PCA 之前,需要对特征数据进行归一化处理。
可通过观察主成分之间的关系,选择合适的健康指标。
Fit Exponenential Degradation Models for Remaining Useful Life (RUL) Estimation
观察健康指标的变化趋势选择合适的衰退模型,这里使用的是指数衰退模型(Exponenential Degradation Models)。利用 predictRUL 和 update 方法对 RUL 进行预测,并实时更新参数分布。
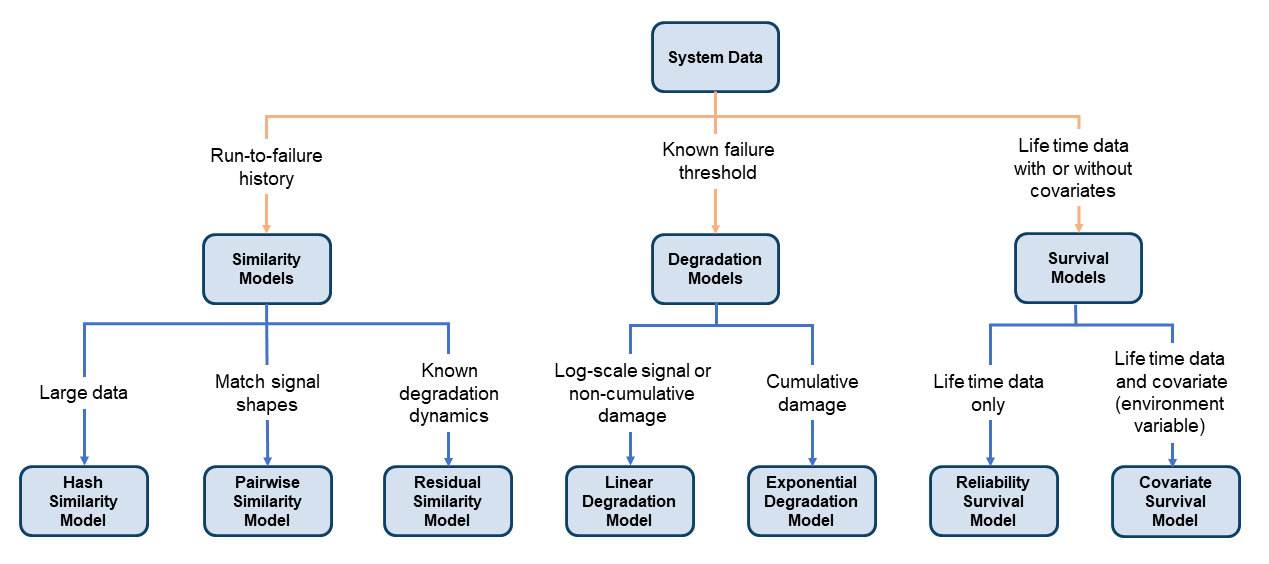
RUL Estimation Using RUL Estimator Models
使用 RUL 预测模型的工作流:
- 选择合适的 RUL 预测模型
- 利用历史数据训练该模型,使用
fit命令 - 利用同种类型组件的历史数据预测待估计 RUL 的测试组件,使用
predictRUL命令,同时还可以利用该测试组件已产生的数据对预测模型进行更新,使用update命令
RUL 预测模型家族:
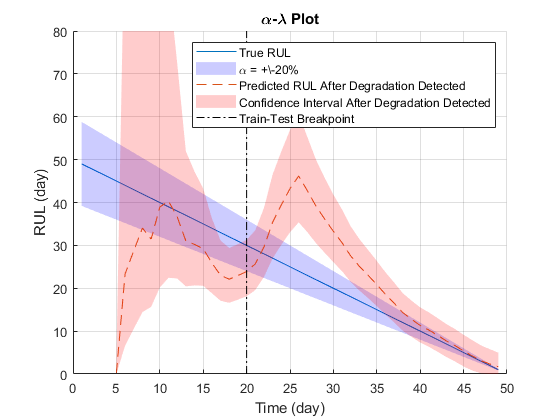
Performance Analysis
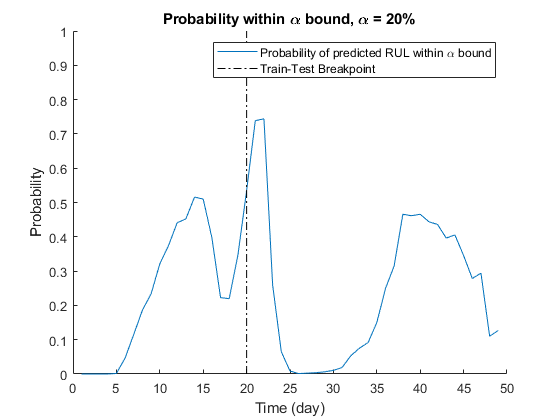
\(\alpha-\lambda\) 图用于预后性能分析(prognosis performance analysis),其中 \(\alpha\) 界限设为 \(20\%\)。估计的 RUL 介于真实 RUL 的 \(\alpha\) 界限之间的概率被计算作为模型的性能度量:
\[ {\rm Pr}(r^*(t)-\alpha r^*(t)<r^*(t)+\alpha r^*(t)|\Theta(t)) \]
其中 \(r(t)\) 在 \(t\) 时刻估计的 RUL,\(r^*(t)\) 表示在 \(t\) 时刻真实的 RUL,\(\Theta(t)\) 是 \(t\) 时刻估计的模型参数。
matlab 相关方法
编程建模
- 加载模型
load_system(<modelname>)
- 创建模型并指定参数设置
new_model(<modelname>)set_param(<modelname>, <Variable>, <Value>)
- 打开模型时通过编程方式加载变量
set_param(<modelname>, 'PreloadFcn', <variable=value>)
- 以编程方式添加和连接模块
add_blockadd_linedelete_line- …
- 通过编程方式命名信号
- 自动排列模型布局
Simulink.BlockDiagram.arrangeSystemSimulink.BlockDiagram.routeLine
- 在多个窗口中打开同一个模型
open_system(<modelname>, 'window')
- 获取 Simulink 标识符
Simulink.ID.getSID(<model/block>)
- 以编程方式指定颜色
控制仿真状态:
1 | set_param(<modelname>, 'SimulationCommand', <command>) |
<command> 可以是 start、pause、continue、stop。
如果使用
start参数启动仿真,则必须使用stop参数来停止仿真。
<command> 还可以是:
update:在仿真运行时动态更新以更改的工作区变量WriteDataLogs:将所有数据记录变量写入基础工作区
检查仿真的状态:
1 | get_param(<modelname>, 'SimulationStatus') |
将返回 stopped、initialzing、running、paused、compiled、updating、terminating 或 external。
常用 matlab 特性
对于大数据,防止数据溢出内存,可以使用 tall 类型,推迟运算,使用 gather 函数进行运算获取结果。具体参见:Deferred Evaluation of Tall Arrays
timer:定时器。
生成和使用模拟数据集合
Generate and Use Simulated Data Ensemble
载入模型
1 | mdl = 'TransmissionCasingSimplified'; |
生成模拟数据集合
1 | toothFaultValues = -2:0.5:0; % 5 ToothFaultGain values |
模拟数据集合存储
1 | ensemble = simulationEnsembleDatastore(location) |
读取数据
1 | ensemble.SelectedVariables = ["Vibration";"SimulationInput"]; |
read(<ensemble>) 函数类似于 Python 中的 next,模拟数据集合相当于 Pyhon 中的生成器。
可通过 reset(<ensemble>) 来将整体数据置于未读状态,从而能够从头读取数据。
追加集合成员数据
1 | reset(ensemble); |
